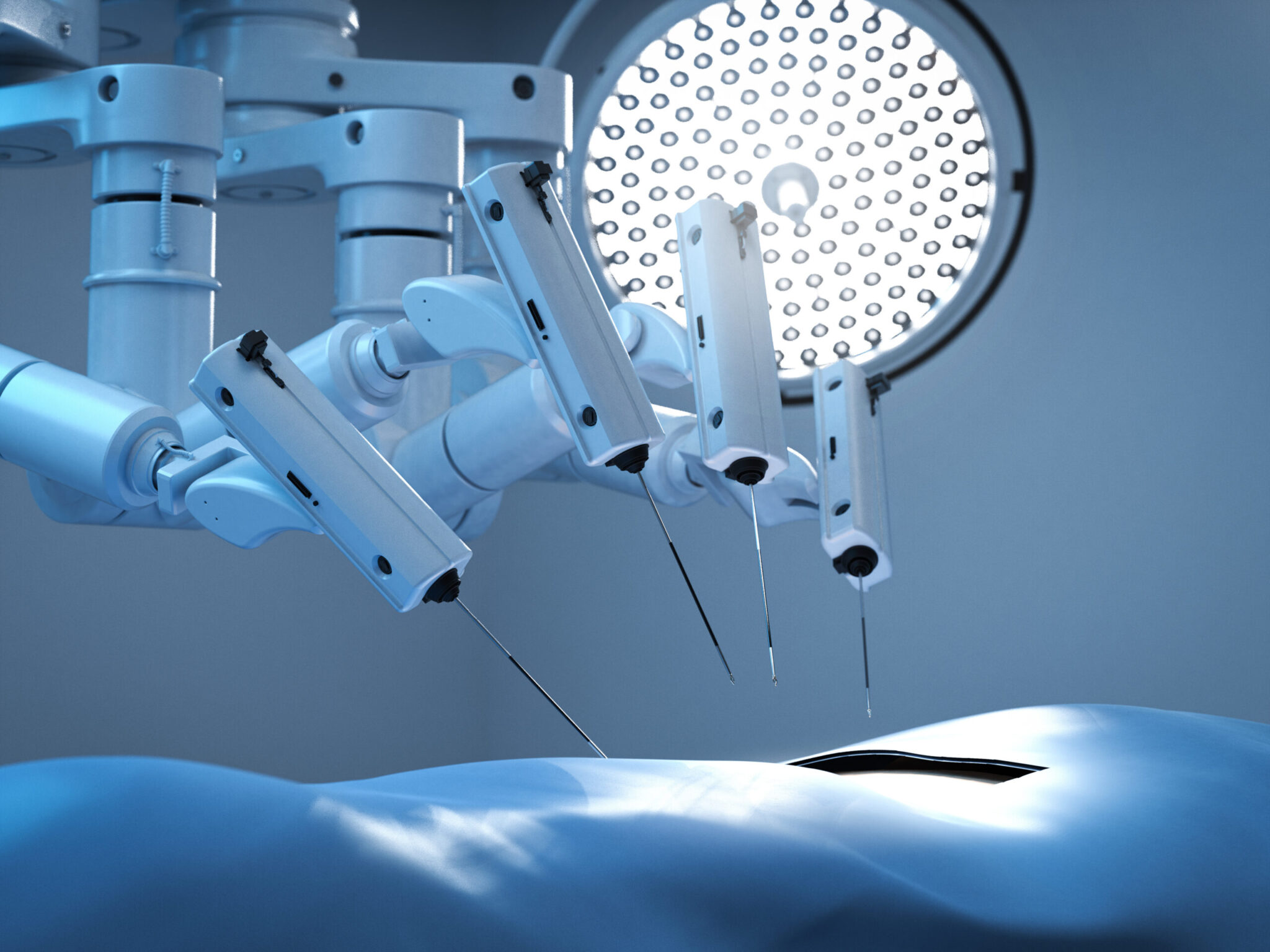
Το ρομπότ ελέγχεται πλήρως από μια κονσόλα, σαν κονσόλα υπολογιστή, χρησιμοποιώντας γραμμές υψηλής ταχύτητας με καθυστέρηση σήματος μόλις 0,06 δευτερόλεπτα – δηλαδή 60 χιλιοστά του δευτερολέπτου